基于PSoC芯片的倒車?yán)走_(dá)控制系統(tǒng)設(shè)計(jì)
隨著汽車保有量的持續(xù)增長(zhǎng)和城市停車環(huán)境的日益復(fù)雜,駕駛安全,尤其是倒車安全,已成為公眾關(guān)注的焦點(diǎn)。倒車?yán)走_(dá)作為一項(xiàng)重要的汽車主動(dòng)安全輔助技術(shù),能夠有效探測(cè)車輛后方障礙物,并通過(guò)聲光等方式及時(shí)預(yù)警,極大地降低了倒車事故的發(fā)生率。傳統(tǒng)的倒車?yán)走_(dá)控制系統(tǒng)多采用通用微控制器(MCU)搭配分立模擬電路實(shí)現(xiàn),存在設(shè)計(jì)復(fù)雜、靈活性差、成本較高等問(wèn)題。本文提出一種基于賽普拉斯(Cypress)可編程片上系統(tǒng)(PSoC)芯片的新型倒車?yán)走_(dá)控制系統(tǒng)設(shè)計(jì)方案。PSoC芯片集成了可配置的模擬和數(shù)字外設(shè)、內(nèi)存以及微處理器核心,其高集成度與可編程特性為簡(jiǎn)化系統(tǒng)設(shè)計(jì)、提升性能與靈活性提供了理想平臺(tái)。
一、系統(tǒng)總體設(shè)計(jì)
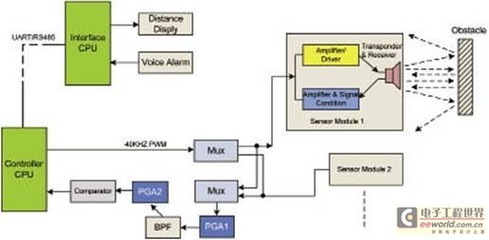
本倒車?yán)走_(dá)控制系統(tǒng)主要由超聲波傳感器陣列、以PSoC為核心的主控模塊、報(bào)警顯示模塊以及電源管理模塊構(gòu)成。系統(tǒng)工作流程如下:PSoC主控芯片周期性地驅(qū)動(dòng)超聲波發(fā)射探頭發(fā)出脈沖信號(hào),并同步啟動(dòng)內(nèi)部高精度定時(shí)器。當(dāng)超聲波遇到障礙物反射后,被接收探頭捕獲。PSoC內(nèi)置的可編程模擬前端對(duì)回波信號(hào)進(jìn)行放大、濾波和比較,生成數(shù)字邊沿信號(hào)。主控芯片通過(guò)捕獲該邊沿信號(hào),計(jì)算發(fā)射與接收的時(shí)間差,結(jié)合聲速即可精確計(jì)算出車輛與障礙物之間的距離。系統(tǒng)根據(jù)預(yù)設(shè)的安全距離閾值,通過(guò)PWM驅(qū)動(dòng)蜂鳴器發(fā)出頻率漸變的報(bào)警聲,并通過(guò)LED陣列或LCD顯示屏實(shí)時(shí)顯示距離信息與方位提示。
二、核心硬件設(shè)計(jì):PSoC的優(yōu)勢(shì)應(yīng)用
- 模擬前端集成:PSoC芯片內(nèi)部集成了可編程增益放大器(PGA)、濾波器、比較器和模數(shù)轉(zhuǎn)換器(ADC)等模擬組件。在本設(shè)計(jì)中,可直接配置PGA對(duì)微弱的回波信號(hào)進(jìn)行放大,利用片內(nèi)濾波器抑制環(huán)境噪聲,并通過(guò)比較器生成精準(zhǔn)的觸發(fā)信號(hào),省去了大量外圍分立元件,簡(jiǎn)化了PCB布局,提高了系統(tǒng)的抗干擾能力和可靠性。
- 數(shù)字系統(tǒng)定制:PSoC的數(shù)字系統(tǒng)由可編程數(shù)字模塊(UDB)構(gòu)成。我們可以利用UDB靈活地實(shí)現(xiàn)精準(zhǔn)的脈沖發(fā)生器(用于驅(qū)動(dòng)超聲波發(fā)射)、高分辨率定時(shí)器/計(jì)數(shù)器(用于時(shí)間測(cè)量)以及PWM控制器(用于驅(qū)動(dòng)蜂鳴器和LED)。所有數(shù)字功能均在芯片內(nèi)部通過(guò)圖形化或硬件描述語(yǔ)言配置完成,無(wú)需外部邏輯芯片,實(shí)現(xiàn)了真正的片上系統(tǒng)(SoC)設(shè)計(jì)。
- 混合信號(hào)處理能力:PSoC內(nèi)核(如ARM Cortex-M系列)負(fù)責(zé)整體的算法控制與邏輯判斷,而其獨(dú)特的可配置模擬與數(shù)字資源并行工作,使得信號(hào)采集、處理與響應(yīng)幾乎可以同步進(jìn)行,極大提升了系統(tǒng)的實(shí)時(shí)性能,確保報(bào)警的及時(shí)性。
三、軟件與算法設(shè)計(jì)
系統(tǒng)軟件在PSoC Creator集成開(kāi)發(fā)環(huán)境中進(jìn)行開(kāi)發(fā)。主要任務(wù)包括:
- 傳感器輪詢驅(qū)動(dòng):以多路復(fù)用方式順序驅(qū)動(dòng)四個(gè)角度的超聲波探頭,實(shí)現(xiàn)全方位探測(cè)。
- 精準(zhǔn)測(cè)距算法:采用溫度補(bǔ)償算法動(dòng)態(tài)校準(zhǔn)聲速,提高不同環(huán)境下的測(cè)距精度。通過(guò)數(shù)字濾波算法(如中值濾波)處理多次測(cè)量數(shù)據(jù),抑制偶然誤差。
- 智能報(bào)警策略:根據(jù)距離遠(yuǎn)近,動(dòng)態(tài)調(diào)整蜂鳴器PWM信號(hào)的頻率和占空比,實(shí)現(xiàn)“慢響-急響”的梯度報(bào)警。可通過(guò)I2C或UART接口控制LCD屏,以數(shù)字或模擬條形式圖形化顯示各方向距離。
- 自檢與故障診斷:系統(tǒng)上電時(shí)自動(dòng)檢測(cè)傳感器連接狀態(tài),并在運(yùn)行中監(jiān)控信號(hào)質(zhì)量,對(duì)異常情況(如探頭污損、失效)進(jìn)行提示。
四、系統(tǒng)測(cè)試與優(yōu)勢(shì)
經(jīng)實(shí)際搭建原型系統(tǒng)測(cè)試,本設(shè)計(jì)在3米范圍內(nèi)測(cè)距誤差可控制在±2厘米以內(nèi),響應(yīng)時(shí)間小于100毫秒,完全滿足倒車輔助需求。與基于傳統(tǒng)MCU的方案相比,本PSoC方案具有顯著優(yōu)勢(shì):
- 集成度高,成本優(yōu)化:大幅減少外圍芯片與元件數(shù)量,降低BOM成本與電路板面積。
- 設(shè)計(jì)靈活,易于升級(jí):硬件功能可通過(guò)軟件重新配置,若要增加功能(如增加通訊接口)或修改參數(shù),無(wú)需改動(dòng)PCB,縮短開(kāi)發(fā)周期。
- 性能可靠:片內(nèi)信號(hào)路徑縮短,減少了外部干擾,系統(tǒng)穩(wěn)定性和一致性更好。
- 開(kāi)發(fā)便捷:PSoC Creator工具提供豐富的組件庫(kù)和直觀的圖形化接口,簡(jiǎn)化了混合信號(hào)系統(tǒng)設(shè)計(jì)的復(fù)雜度。
###
本文設(shè)計(jì)的基于PSoC芯片的倒車?yán)走_(dá)控制系統(tǒng),充分利用了PSoC高度集成、靈活可配的混合信號(hào)處理能力,構(gòu)建了一個(gè)精簡(jiǎn)、高效、可靠的硬件平臺(tái)。該設(shè)計(jì)不僅實(shí)現(xiàn)了倒車?yán)走_(dá)的基本測(cè)距與報(bào)警功能,其靈活的架構(gòu)也為未來(lái)集成更復(fù)雜的算法(如盲區(qū)監(jiān)測(cè)、自動(dòng)泊車輔助)預(yù)留了空間,體現(xiàn)了現(xiàn)代嵌入式設(shè)計(jì)向高集成度、智能化發(fā)展的趨勢(shì),為汽車電子控制系統(tǒng)開(kāi)發(fā)提供了一種有價(jià)值的參考方案。
最新產(chǎn)品